Jaden Zhang
7'' Quadcopter Project
Independent Design Project
With my joining of multiple design teams in my first year studying engineering at the University of Toronto, I had the chance to interact with many design pipelines and best practices for realizing a project from inception. Thus, during my first year's winter break, I commenced my own design project - a 7'' quadcopter remote-controlled drone. Ensuring that I had the full experience of a project, I experienced all aspects of the design process, including brainstorming, iterated candidate designs, design process documentation, CAD/digital modelling, manufacturing, prototyping, and a mind-breaking amount of troubleshooting both electronics and firmware.
Though still definitely a work-in-progress, the current iteration of the drone flies relatively well and stable, being in flight manuverable and able to land smoothly repeatedly. The next major steps include optimizing (for mass and stiffness) the four motor arms and baseplate by transitioning to thin carbon fiber, as well as revamping battery mounting for better stability and safety.
Manufacturing currently paused due to my inability to effectively flash firmware to my Ender3 3D printer without bricking it :(
December 2025 - Present
Key Skills: Full design cycle experience, Firmware editing and flashing, Telemetry data analysis, 3D print Manufacturing, Frequency Filter Application
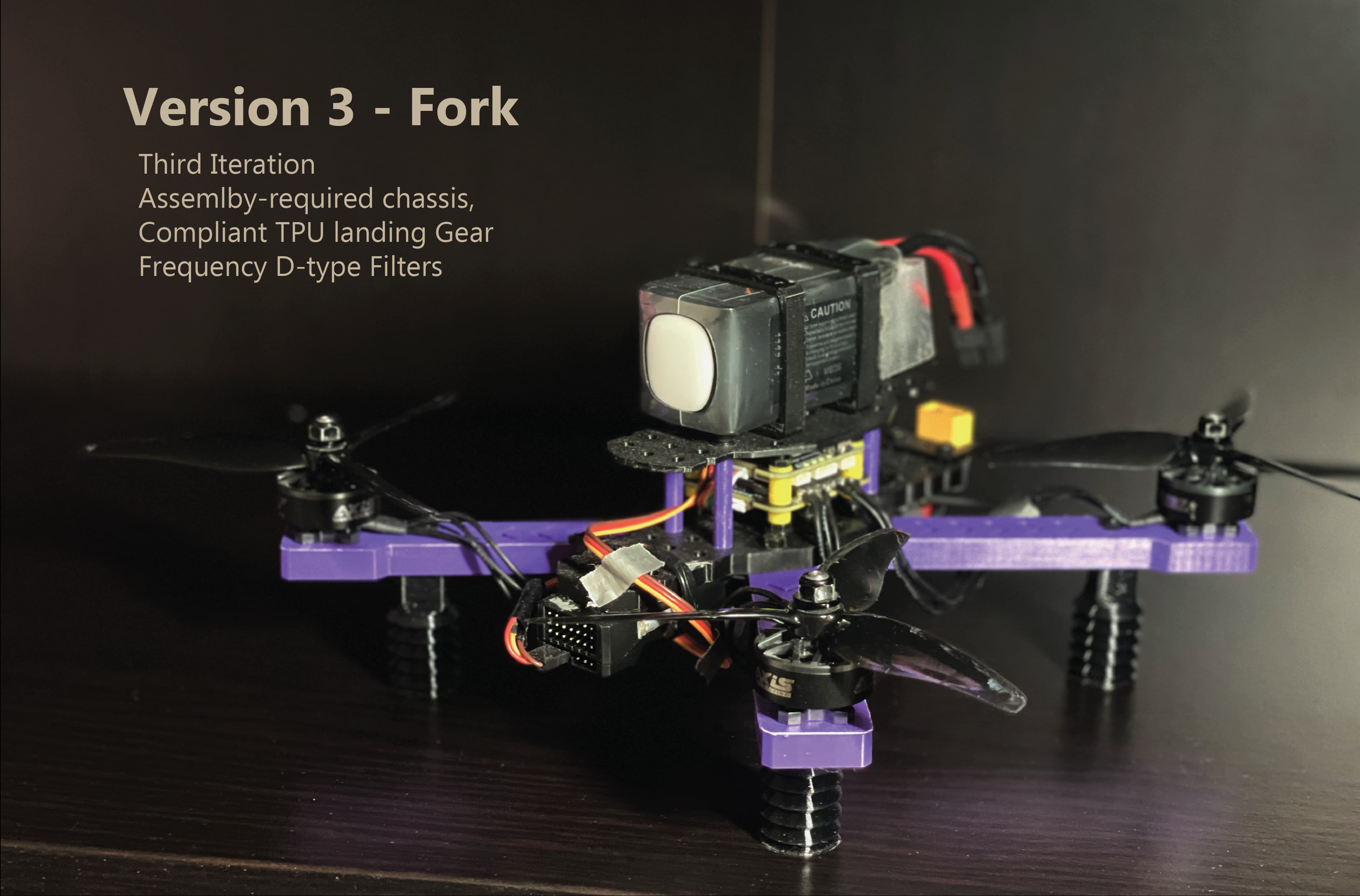
Quadcopter v3 (Fork)
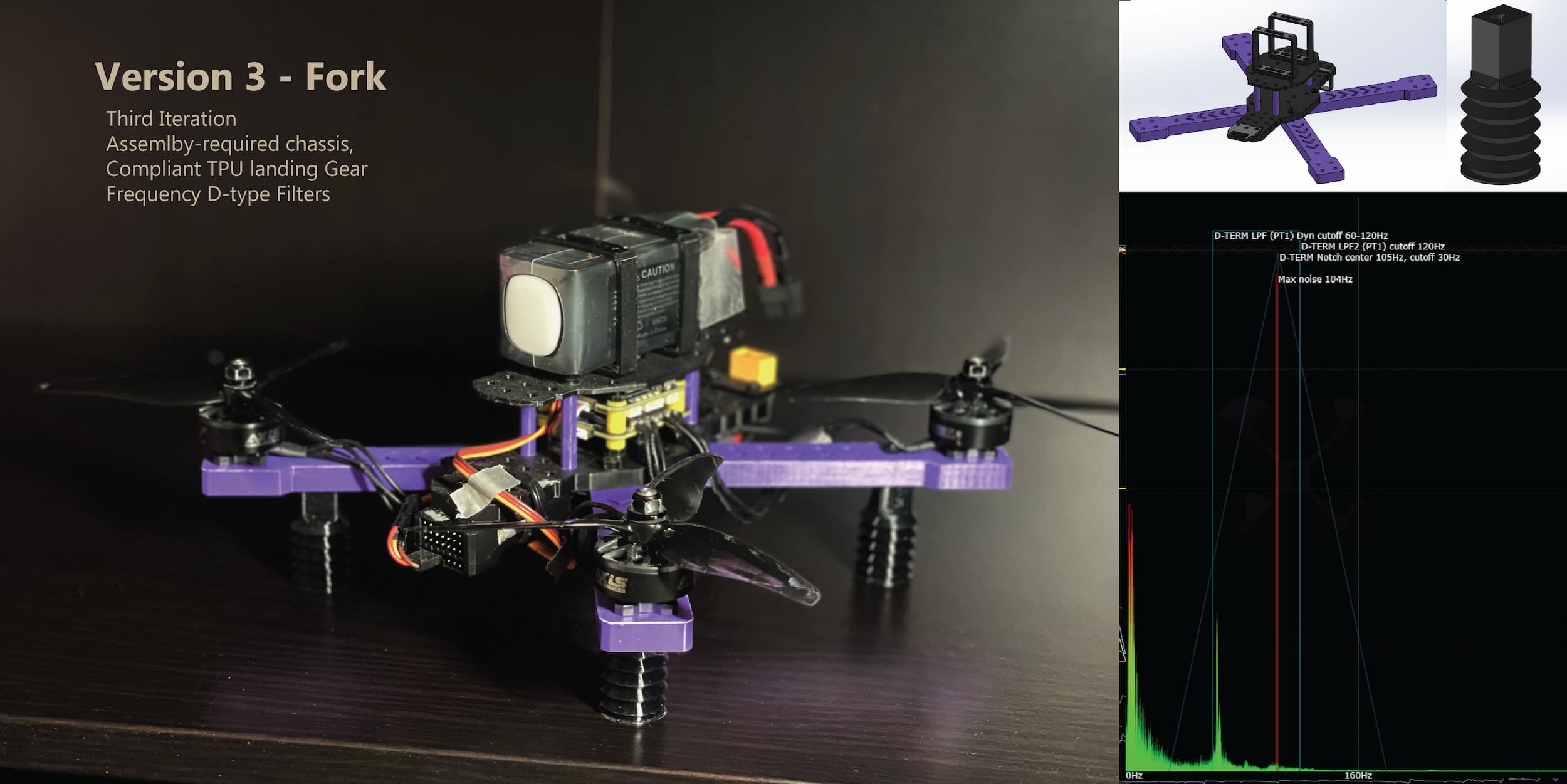
The third major iteration of the quadcopter, v3 leverages its new compliant TPU landing gear and major D-type filters to take off and stabalize better. This design also finally fixes the issue of a vibrating frame when idling on the ground, as its landing gear can absorb the slight but compounding vibrations generated naturally from the spinning motors.
Next steps involve improving the arm effectiveness using warjet carbon fibre sheets and battery location to lower center of gravity.
The designation, Fork, comes from the inspiration of the shock absorber designs being motorcycle fork covers.
- CAD using Solidworks to model quadcopter frames and hardware (McMaster-Carr) for 3D printing and ensuring compatability with purchased components including LiPo battery, flight controller/motor ESC stack, and motors
- Firmware configuration and testing using Betaflight UAV firmware configurator to ensure proper signal channel alignment from radio transmitter to receiver to motor operations
- Applied D-type low bypass sweep and D-notch type frequency filters to remove frame vibration noise from gryoscope telemetry and accurately read gyroscope/accelerometer measurements
- Telemetry data analysis with SpeedyBee Flight Controller's blackbox implement to detect and take steps to correct vibration noise issues, motor RPM sensitivity/PID settings, and faulty soldering through inconsistent motor power draw
- Radio receiver (FS-iA6B) and transmitter (FS-i6 2A) to allow for remote controlled arming, flight, and landing the RC quadcopter
- 3D print settings slicing and tuning for materials including ABS, PETG, and TPU 95A
The currently operating design, this iteration is more aimed towards optimizing landing and takeoff smoothness, as well as modularlity of the drone to allow for more flexible redesigning.
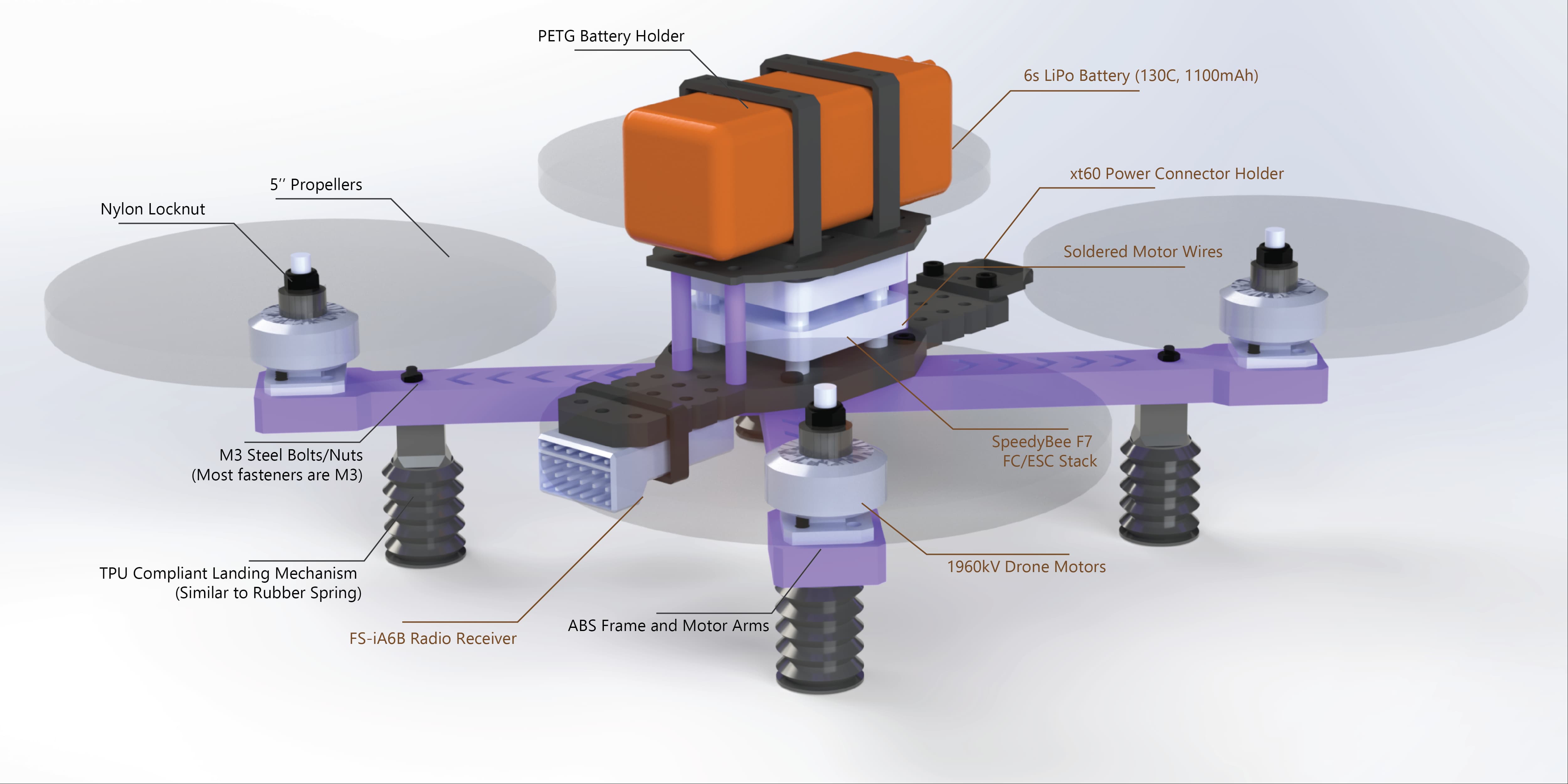
The Solidworks assembly main CAD of the version 3 quadcopter. Labelled are mechanical components on the left, and electrical on the right
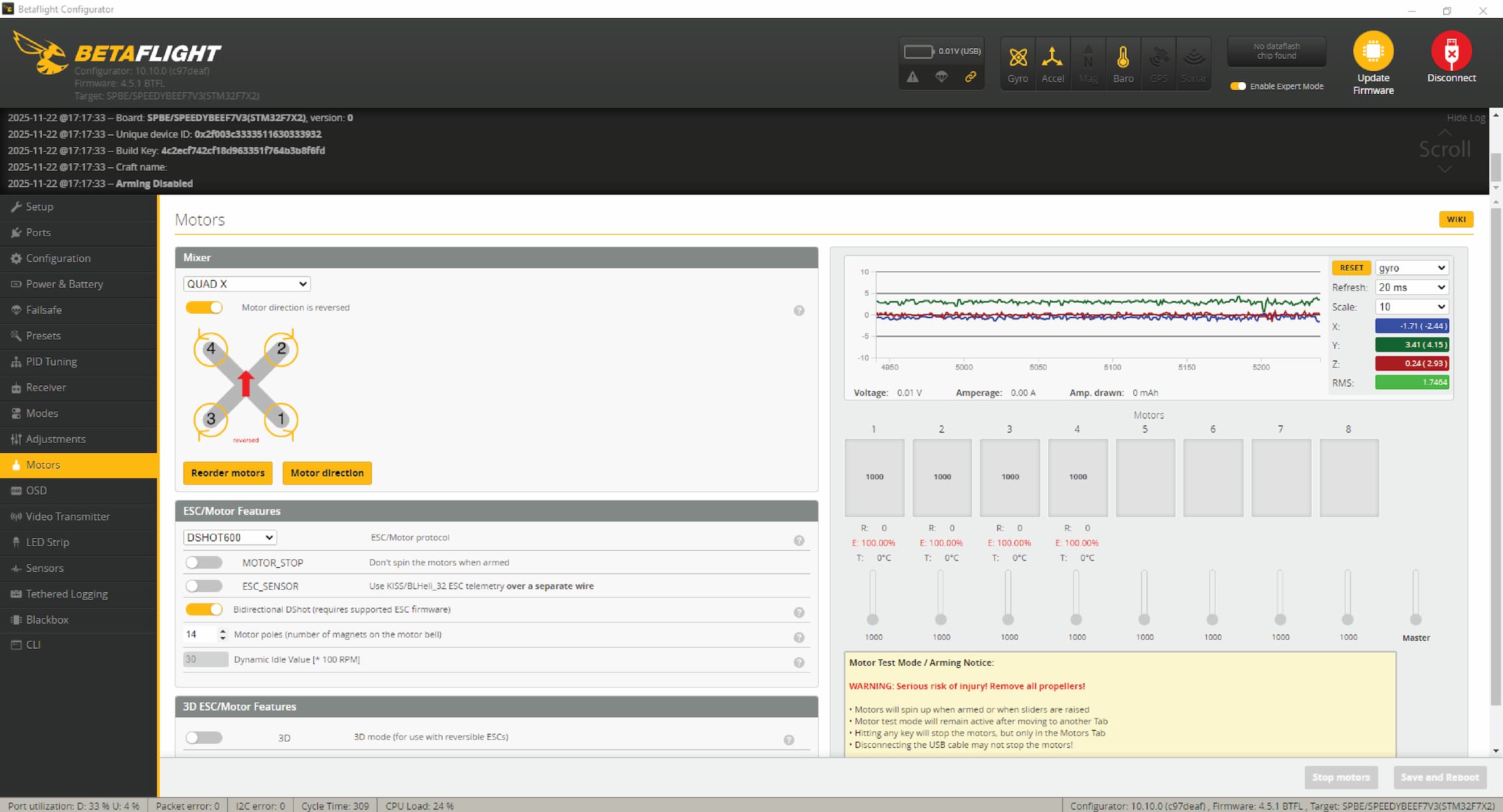
The Motor tab of Betaflight Configurator (Flight Controller firmware configurations software). This tab includes general motor setup (not including PID here) on the left, and motor RPM/control testing on the right, along with a real time telemetry feedback graph on the top right.
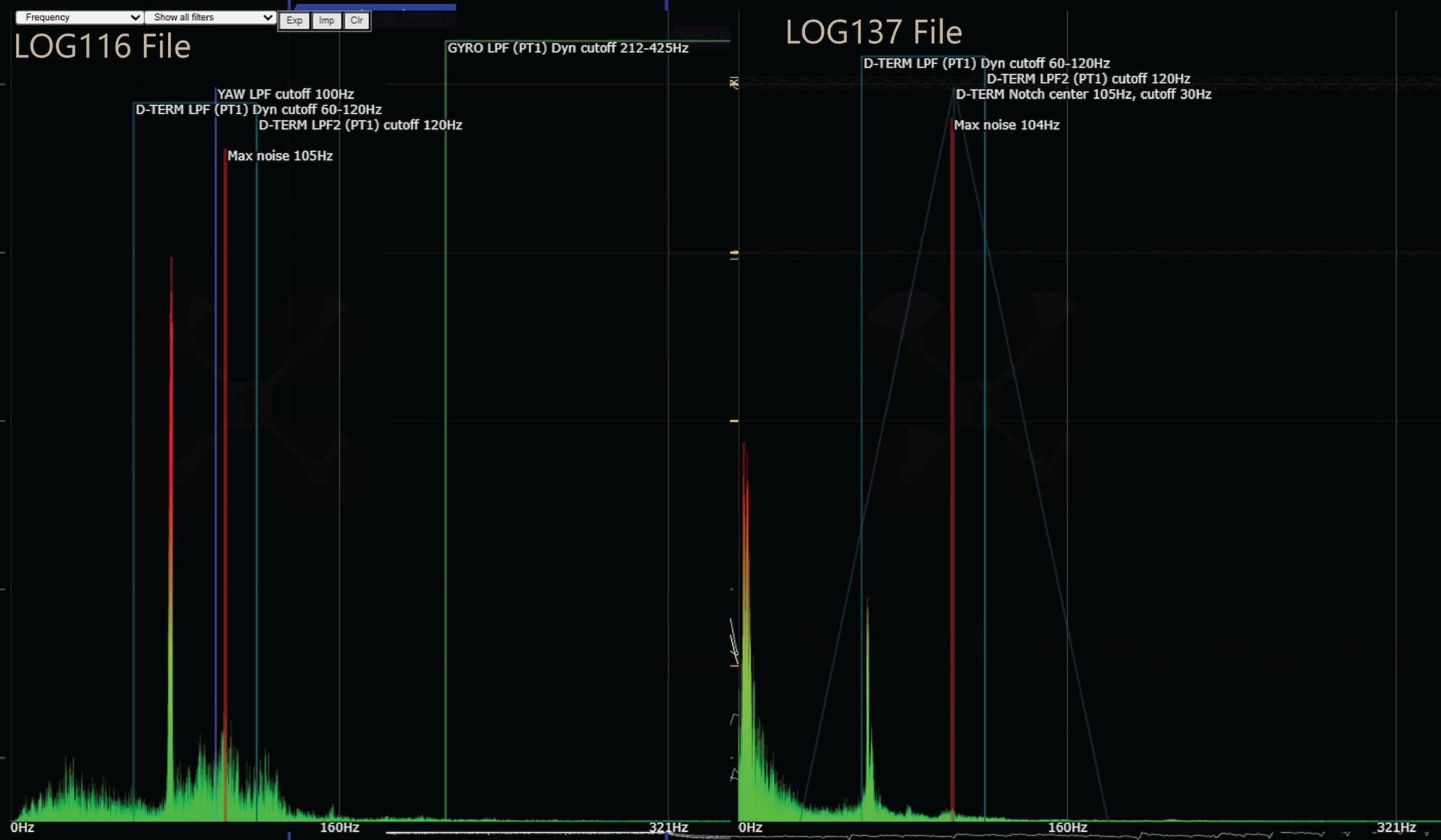
The frequency analyser map for before (left) and after (right) specific D low bypass and D-notch type frequency filters tuned specifically to remove noise from this design, both taken from blackbox info after flight tests. Note the ^ shaped D-TERM Notch in the right chart, specifically configured to rectify the Max Noise of 105Hz from the first blackbox feedback. The change was in tuning filters and a new compliant landing mechanisms; it was implemented and documented August 27th, 2025
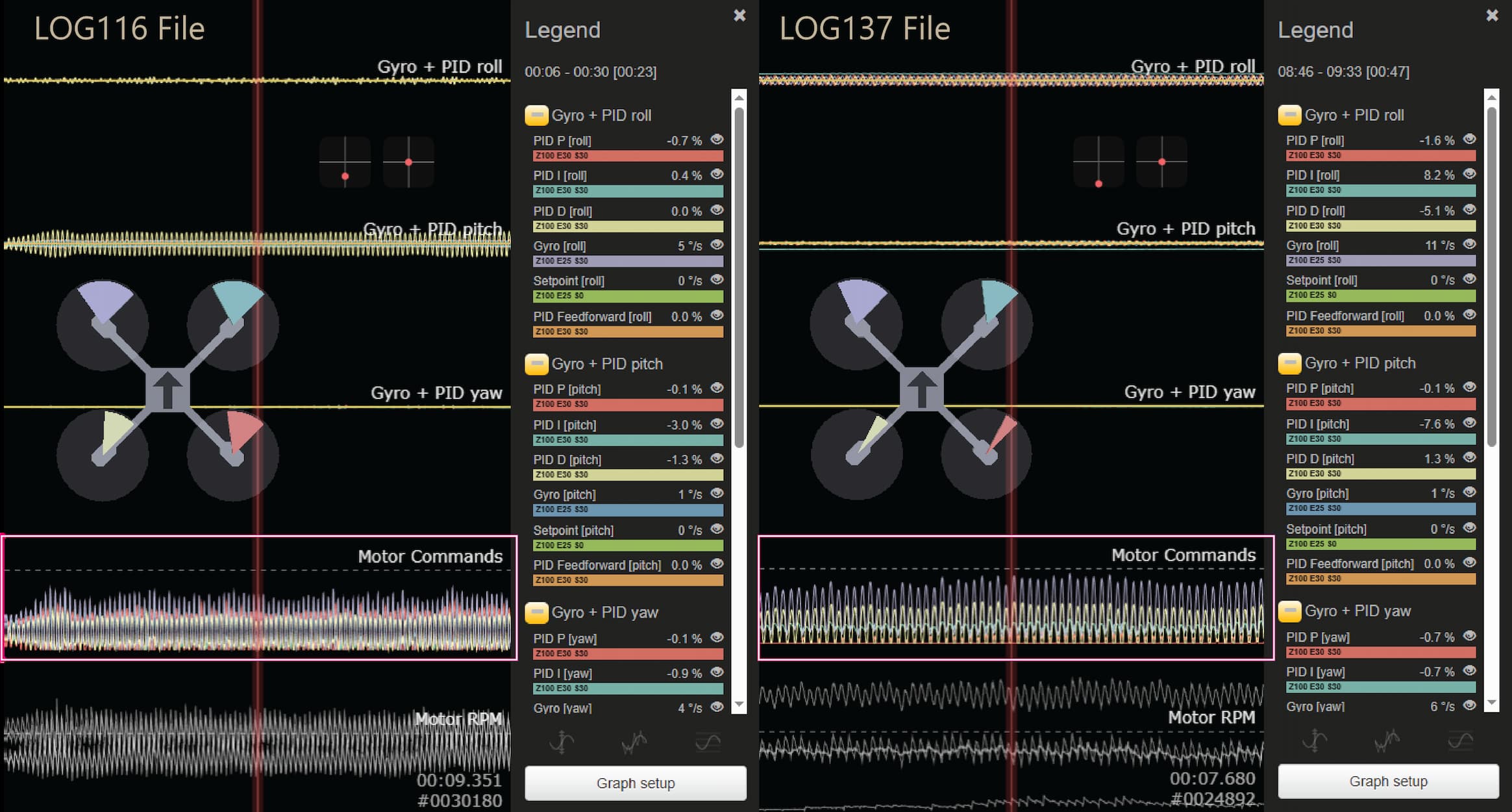
Some more visualization of the change from the previous slide, note that the motor commands after iteration were much more in sync, rather than the sort of crowding and interfering commands of before. Additionally, the gyroscope telemetry was much more stable (and realistic) in the improved design.
Pervious iterations
No design is constructed perfectly from the very first iteration, even those designed by the ever-so-perfect myself. The two major previous prototypes are displayed below. Though these design choices and concerns are detailed in the engineering notebook, a brief, high-level overview is presented here.
Additionally, many individual components have gone over iterations as well as a result of significant faults that could be relieved without making major revisions to the current design.
- Iterated entire project design multiple times by following the Design-Make-Test-Analyse (DMTA) framework by identifying key faults and achievements of each design
- BoM construction of designs, and by weighing 3D printed parts and purchased electronics/hardware, to estimate mass for simple calculations
- Document, Assembly and Component local file organization of Solidworks assemblies/parts files, Adobe Illustrator notebook, and .csv blackbox files for consistent and organized file management

The first design was focused solely on getting something up in the air. The entire frame was print-in-plane and required no assembly at all. This design, though it was able to hover for a very limited time, encountered many issues, including strong frame vibrations, weak/inflexible landing gear, poor soldering, and eventually accidentally severing a radio signal wire with its propeller due to faulty wire management. Nicknamed Rabbit for its antennae looking like rabbit ears.
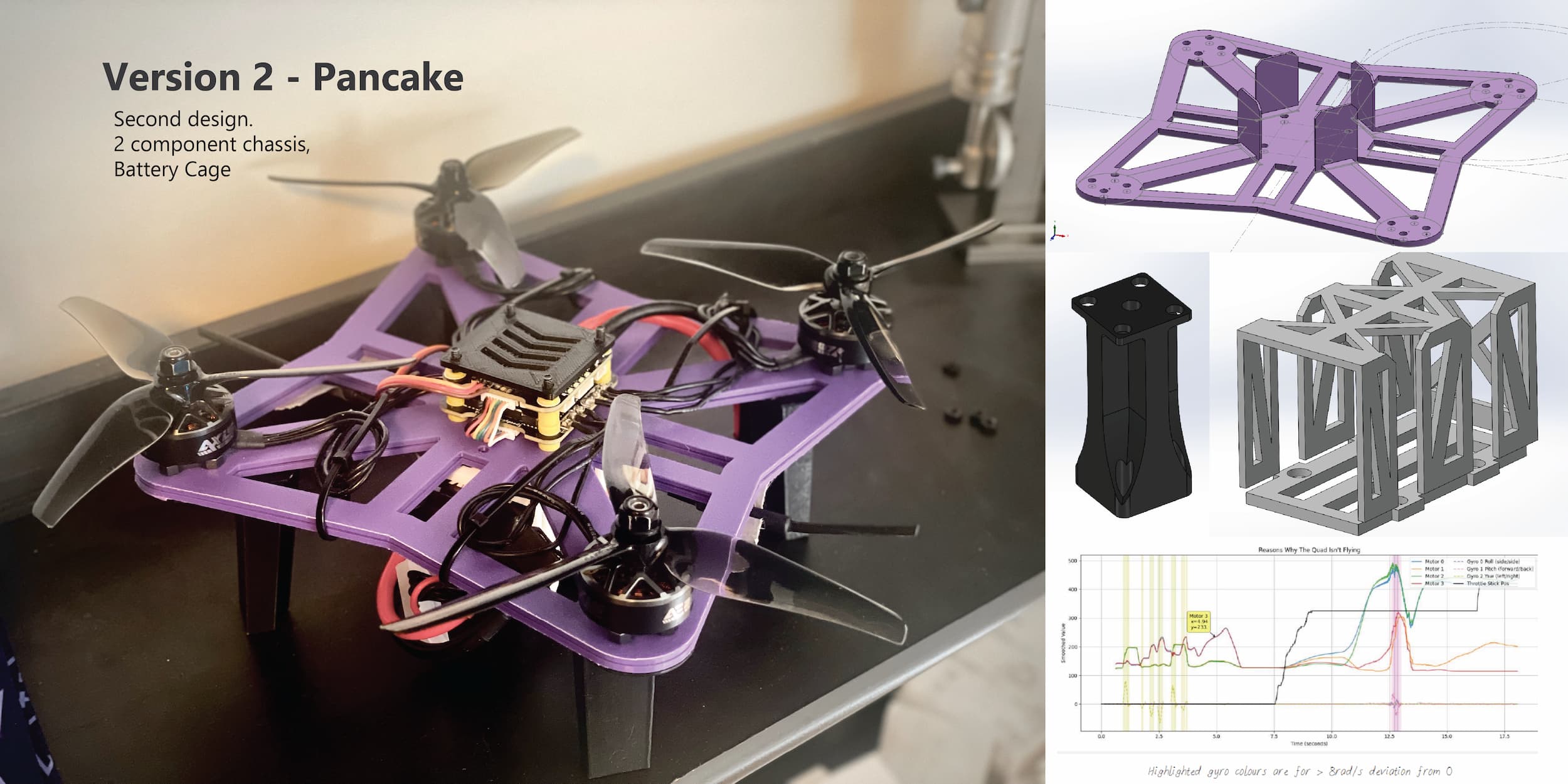
The second iteration aimed to be able to lift off more smoothly, while protecting its internals to not have any construction failures like the first did. This model still printed the large part of its frame, only have separate landing gear/feet to support. Additionally, the battery holder was improved from just tape to a solid PLA cage assembly, and Python MatplotLib was used to plot and analyze motor and telemetry functions. The frame initially held four walls for electronics protection, but eventually were found to be inefficient, and the bowing of the large frame was fixed by stacking an inverted frame beneath, earning its designation, Pancake.
The currently operating design, this iteration is more aimed towards optimizing landing and takeoff smoothness, as well as modularlity of the drone to allow for more flexible redesigning. Additionally, the implementation of signficant analysis tools such as the blackbox viewer and frequency analysis map, allowed for better problem identification. The usage of more materials, such as TPU, stainless steel fasteners, and eventually carbon fibre allowed for a more targeted design for each component. The design of the landing gear, inspired by motorcycle fork covers, led to the nickname Fork.
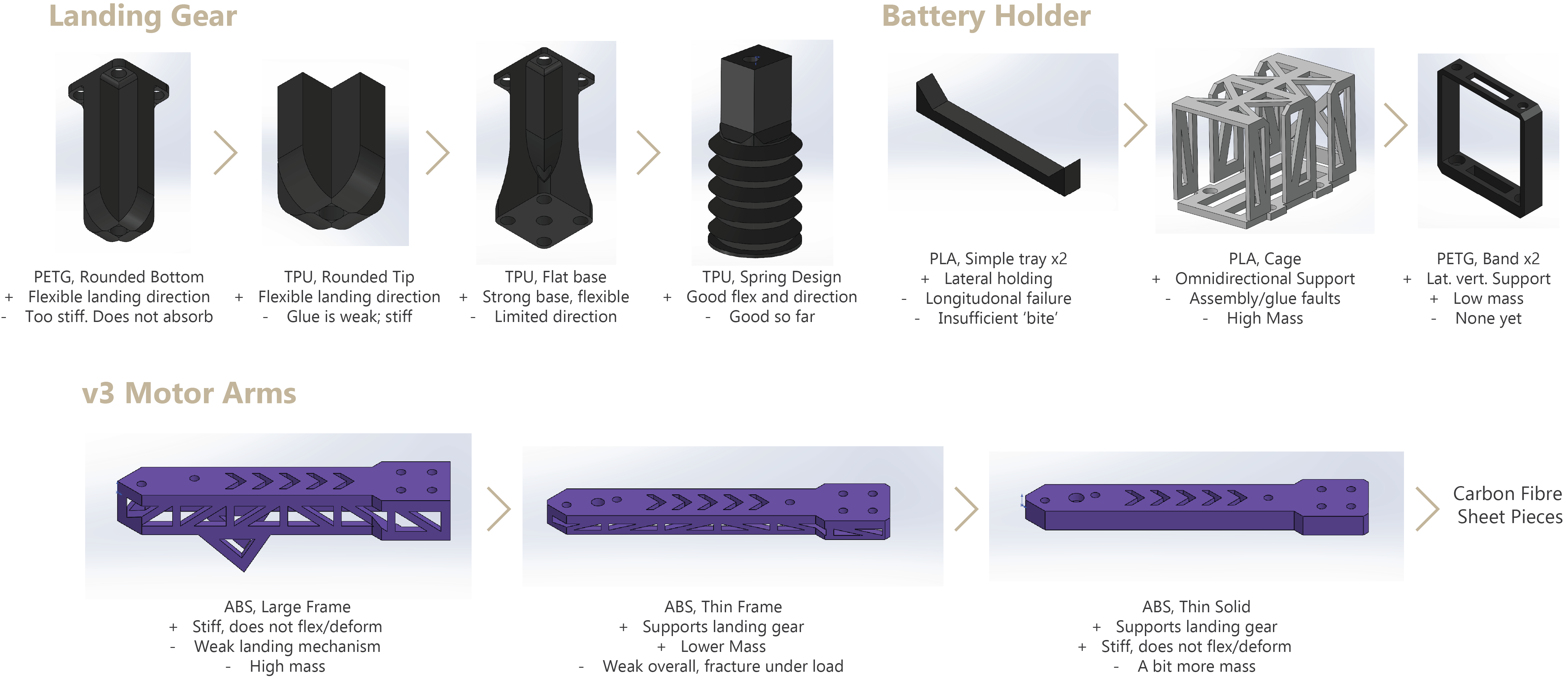
Some design iterations of individual components. Some components, such as the battery holders, were iterated along with the entire drone design, while other such as the landing gear and motor arms sometimes were iterated within the same overall design, highlighting the importance of the modularity introduced by v2 and improved on by v3.
Engineering Notebook
As with any somewhat long lasting project, documentation of design choices and any issues that arise is incredibly important. Troubleshooting has taken up the majority of my time throughout this project, and being able to track why decision were made and how to solve common issues is an integral part of staying efficiently progressing.
Though informal, the following document (accurate as of April 2025 due to exporting issues) is upkept daily with improvements to the quadcopter.
- Logging issues and TODOs as they occur throughout all major days spent to track design issues and solutions
- Tracking design iterations through tests (motors, radio receiver/transmitter, flight controller, gryoscope) uploaded on Youtube