Jaden Zhang
Combat Robotics
University of Toronto Robotics Association - Combat
Designing and building competitive 1lb (antweight) and 3lb (beetleweight) battle bots is the core of combat robotics at the University of Toronto Robotics Association (UTRA) Combat subdivision, from computer aided modelling, 3D printing, manual machining, electronics soldering and radio configuration.
With the goal of doing as much physical (and psychological) harm to opposing robots in the ring, we compete mutliple times annually at Botbrawl (Canada) and National Havoc Robot League [NHRL] (United States), with a lineup of unique robots, a couple of which I had a hand in designing/manufacturing.
Key Skills: Radio Transmitter/Receiver Configuration, LiPo Battery Management, Material Selection, Robotics Assembly/Design, 3D Print-Compatible CADing
3LB BOT - ATLAS V3
April 2025 - Present
With a ruleset change heavily unfavourable to Atlas V2, we pivoted this year to a new, more compact and efficient 3lb bot design with wheels instead of shufflers, while still retaining the core design philsophies of its ancestor. Currently living in Solidworks, we aim to have a fully functional and troubleshooted robot by mid Janurary 2026.
In collaboration with: Indesh Vijayanand, Jonah Kittmer, Lucas Skotiniotis, Angela Mou, under UTRA Combat
- Achieved a more than 20% mass reduction in compliance with rules, reducing horizontal and vertical profile by more than 30% and 15%, respectively
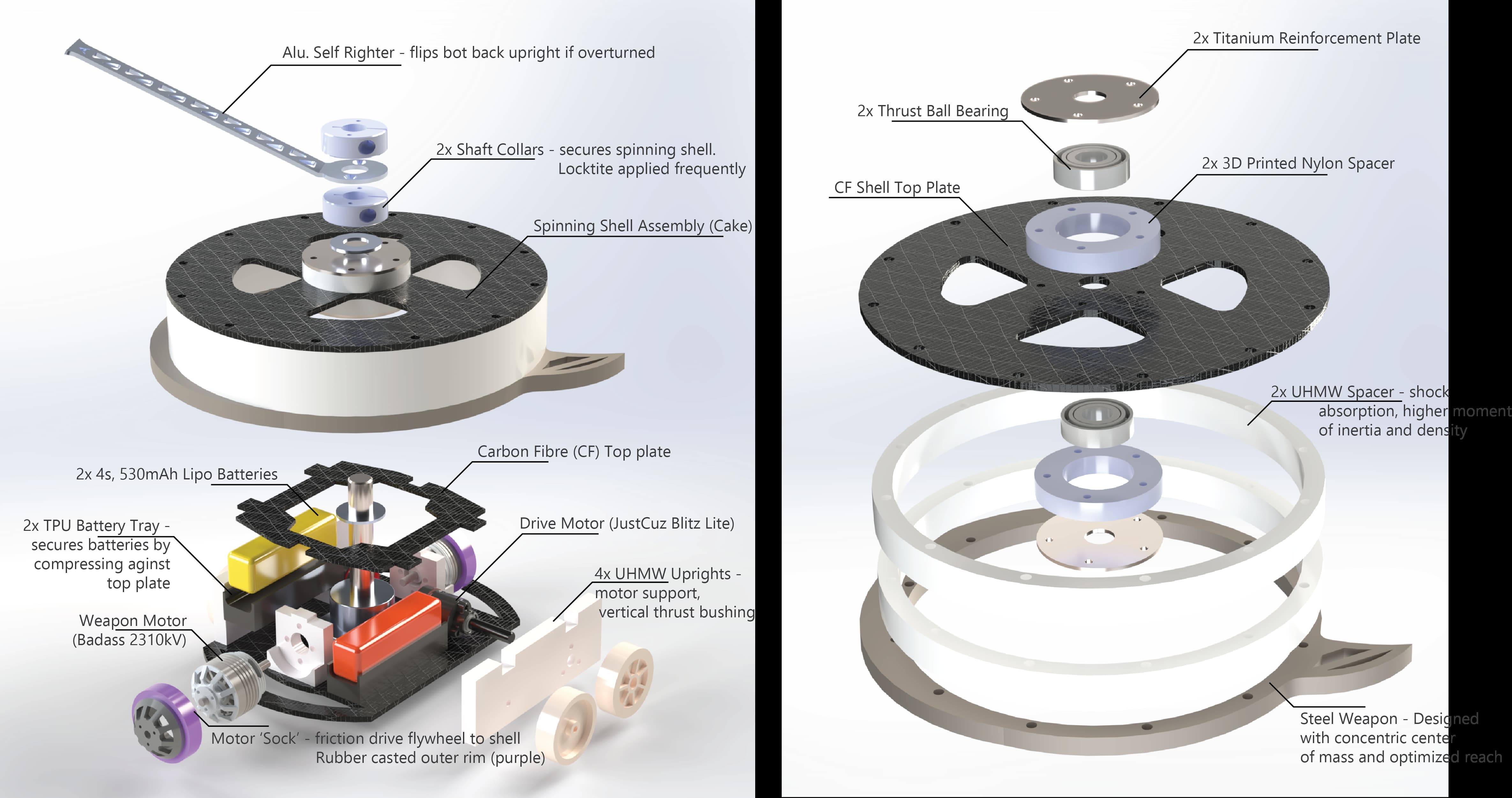
- Full part and assembly design CAD in Solidworks, including fasteners and electornics placeholders, considering manufacturability, budgeting, and operational ability
- Material assignment for function and weight, including consideration of Aluminium 6061, Titanium (Grade 4), TPU (95A), PLA+ (Higher strength PLA), Carbon-fibre (Water-jet outsourced), and reinforced Nylon-6 (Carbon Fibre/Glass Fibre reinforced Nylon)
- Electronics layout consideration, including LiPo battery, finalizing on 2x 4s 600mAh batteries for optimal capacity (~5 minutes, or 1 round), and sufficient current
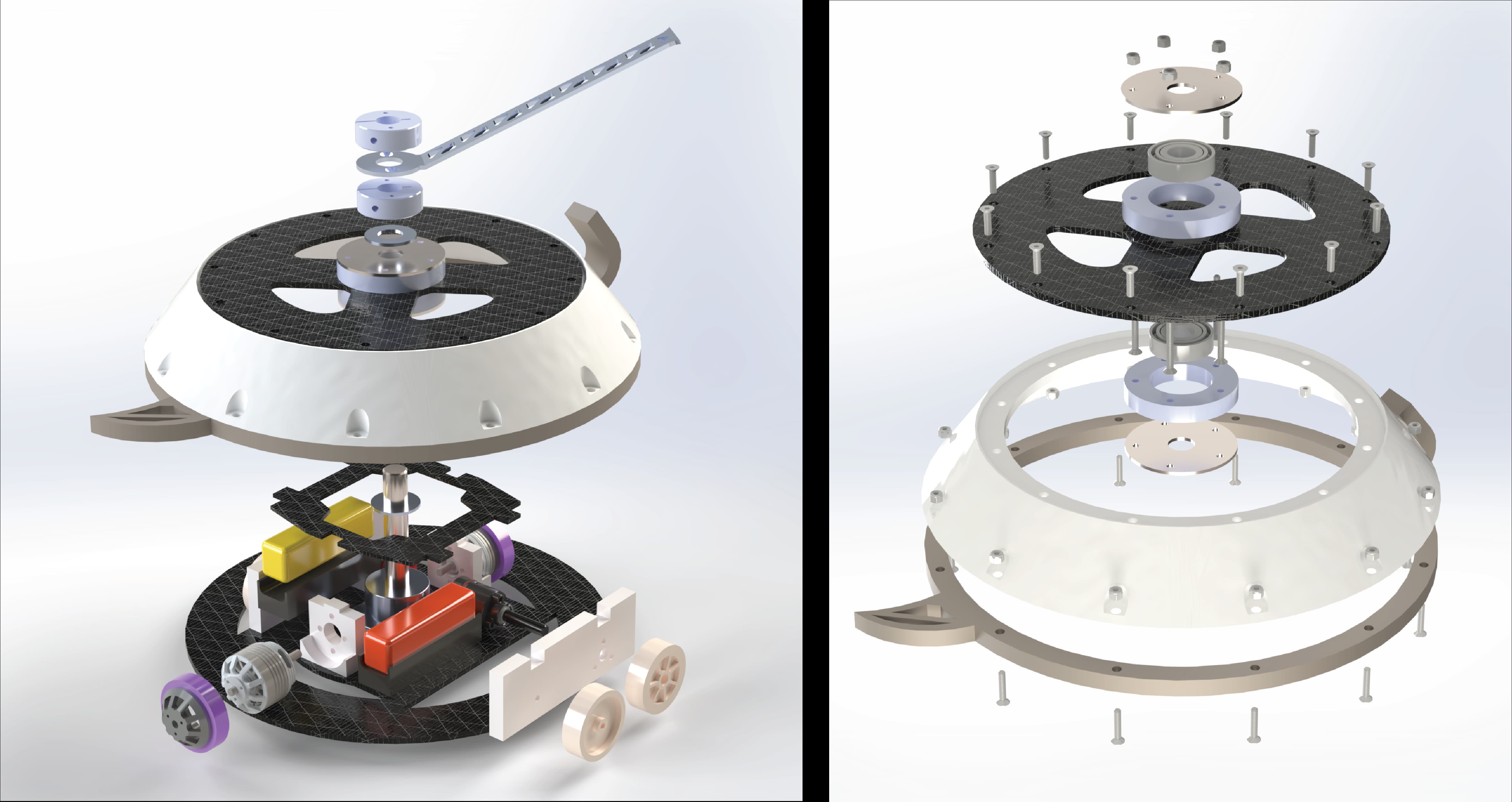
One of our newer designs, the angular shell more effectively deflects impacts from other bots, while also lowering center of mass to minimize the chance of being flipped upside down. The steel weapon's counterweight, typically an idle protrusion in most designs, has also been edited to be a vertical brace, providing vertical cover when the shell is spinning.
Affectionately named 'Cake Atlas' for its shell assembly layout, this shell design is inherited from the previous iteration, providing vertical modularity for the steel weapon to be at the very bottom or between the white UHMW shell spacers. Compared to an angular design, it has a smaller footprint, though is quite susceptible to being overturned in competition.
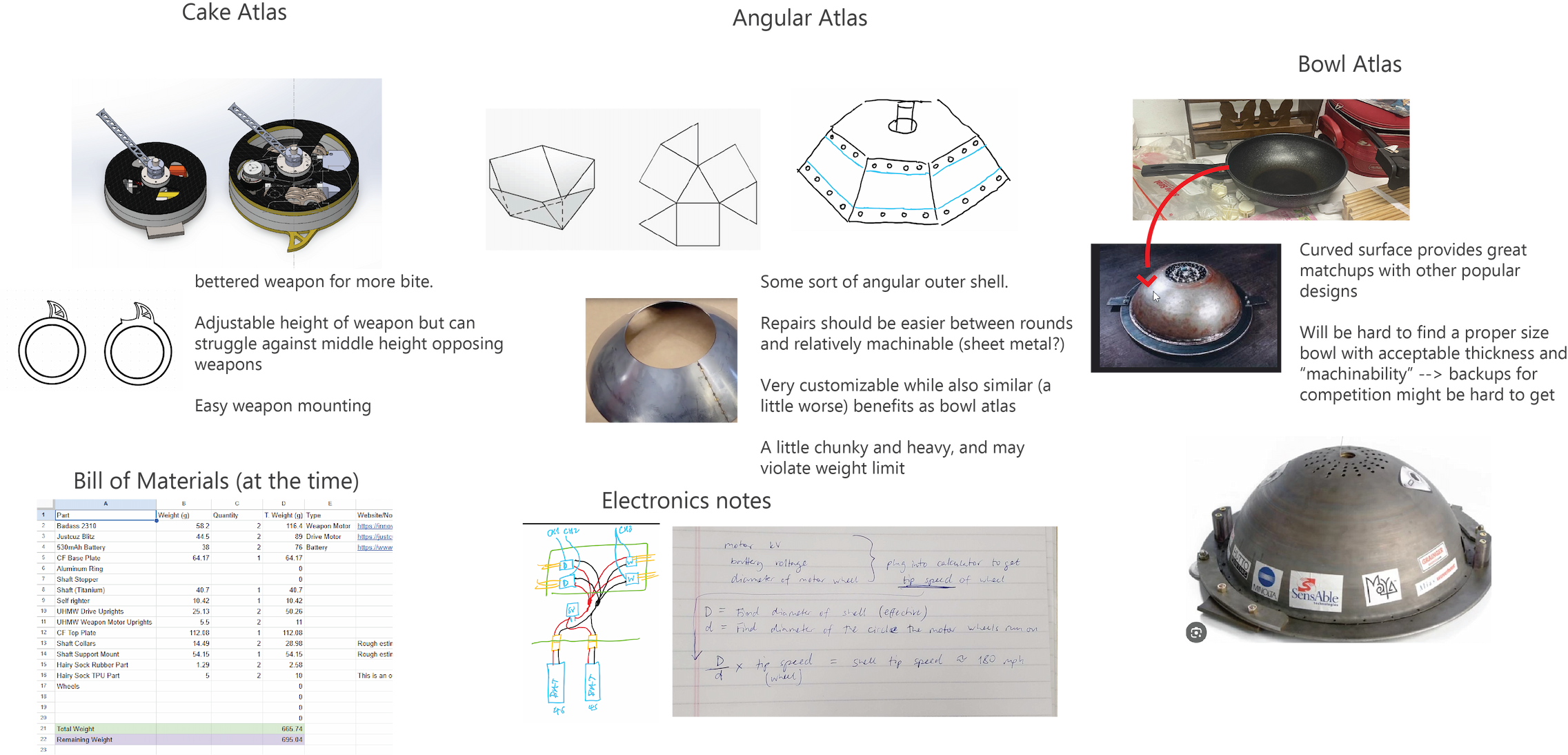
A rough collage of points and images of reference used to construct ATLAS V3 in the brainstorming phase, mainly to do with shell design as it is the core of ATLAS' functionality.
1LB BOT - POPOFF
January 2025 - May 2025
A compact construction of kinetic energy, this bot fights in the 1lb weight class with a vertical spinning piece of hardened steel that just happens to make up more than 50% of its total mass. Due to this construction, the TPU body/housing needs to as compact and minimal as possible, with wheels that can handle the overwhelming gyroscopic effects induced by the large spinning mass.
In collaboration with: Leo Ping
- General maintenance and iteration of bot design, from wheel construction/sizing and TPU housing adjustments
- Heavy troubleshooting of radio receiver and transmitter pair (FS2a and FS-i6 Flysky) for signal interference, distance issues, and mix/channel configurations to maintain connection and responsiveness from across the box
- 4s LiPo battery troubleshooting and maintenance, including soldering cell connections and manipulating LiPo charger configurations to revive batteries from under functional minimum cell voltage (< 3.0V) to maintain LiPo rechargability and current output
- Live troubleshooting and repairs during competitions, including Dremel work on the housing and resoldering cut/damaged wires during fights, leading to a top 10 finish in its first competition and a Best Rookie community award
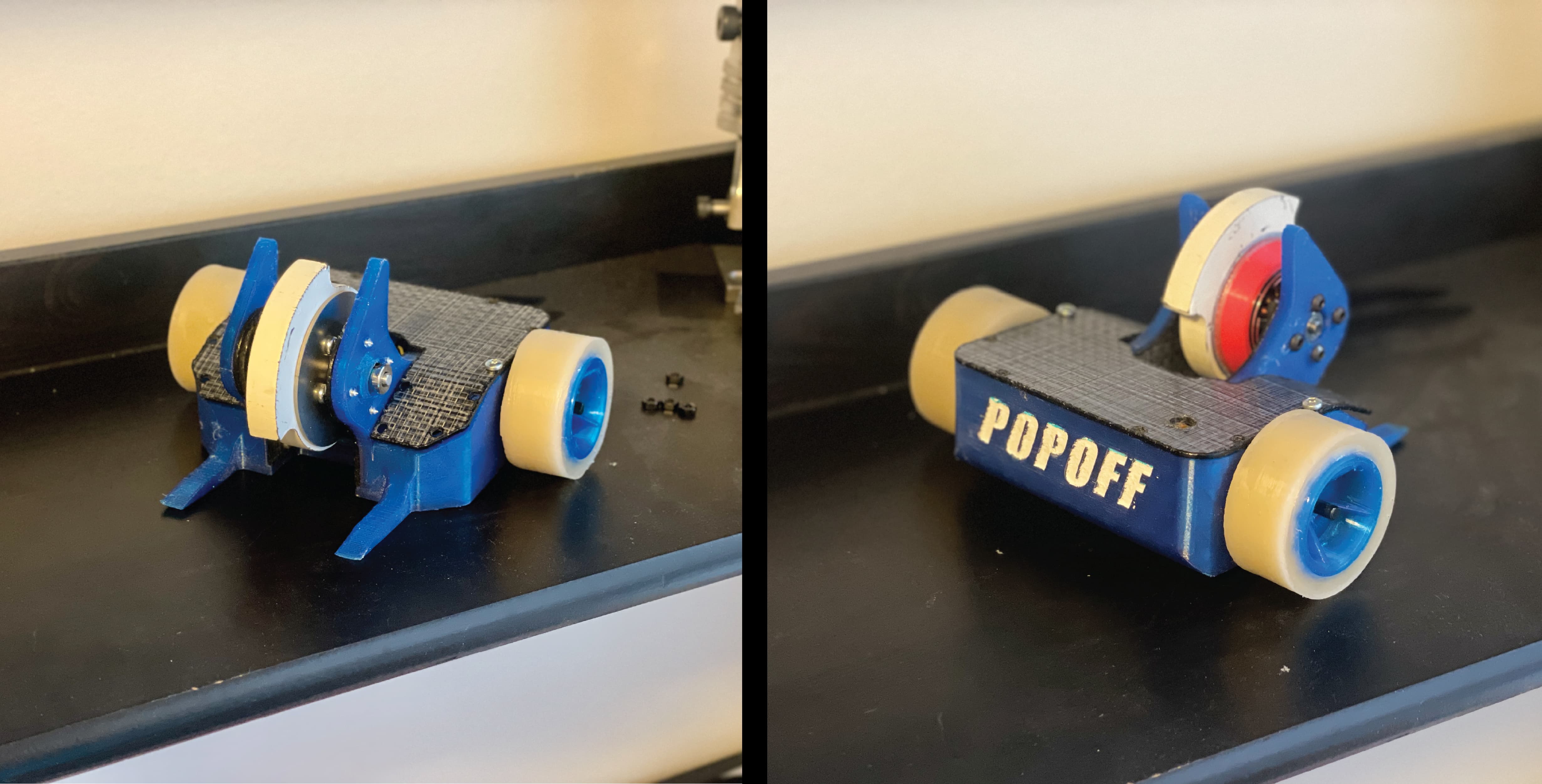
Popoff before the competition, sporting heavily iterated wheels, cast with Vytaflex rubber for extra grip.
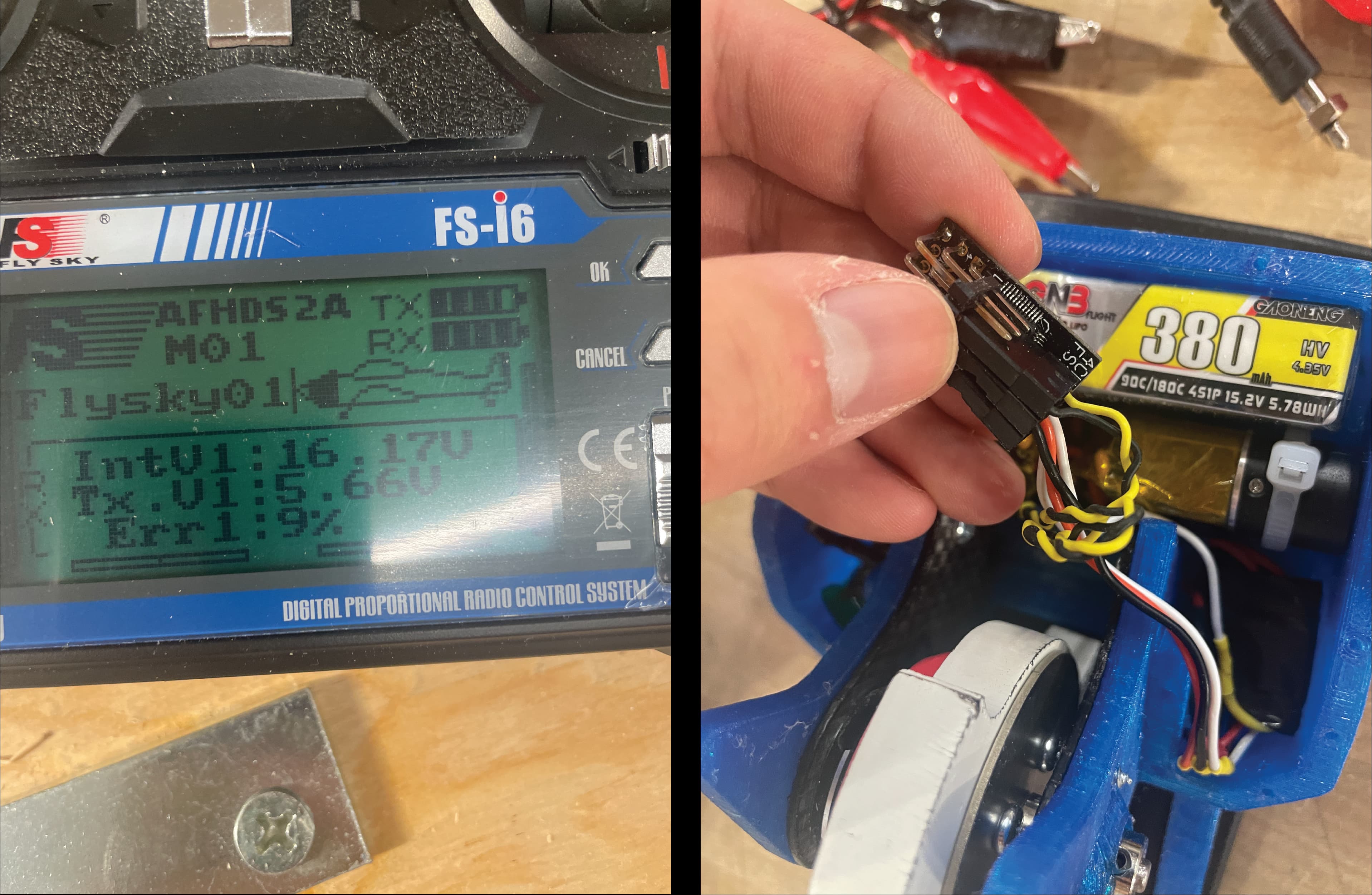
Troubleshooting and pairing radio transmitter and receivers (FS2a and FS-i6 Flysky), as well as adjusting/protecting antena.

Soldering and tracking progress when troubleshooting the 4s LiPo battery. LiPo charger was switched to NiCd charge to bypass balance charging, allow the 4s (which effectively became a 3s temporarily due to a dead cell) to be jumpstarted.
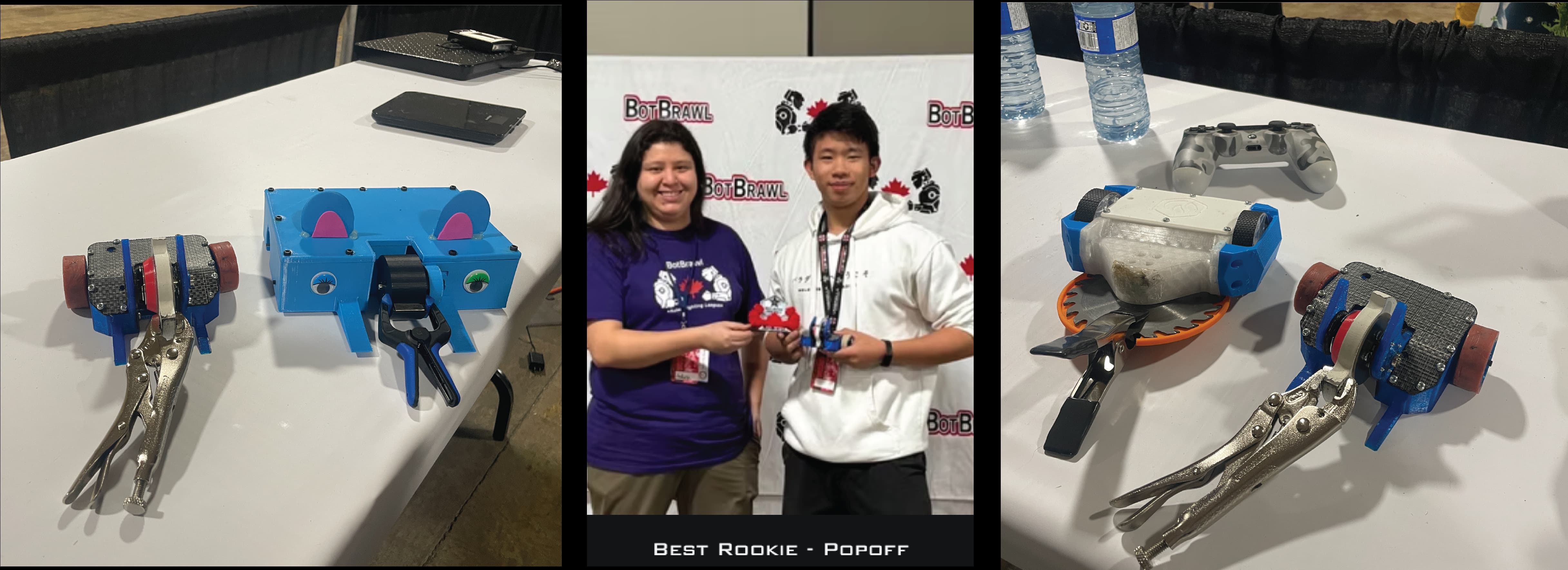
Pre-battle photos with some other bots at the competition! Also won the Best Rookie community voted award.
3LB BOT - ATLAS v2
September 2024 - June 2025
This 4.5lb full shell spinner fights in the 3lb weight class due to the weight bonus earned by its distinctive movement mechanism: not wheels, but a 4-foot shuffler set. A timing belt driven outter shell is outfitted with UHMW uprights and a hardened steel 2-tooth weapon allows ATLAS v2 to use its rotating shell as both an offensive tool and a defensive mechanism by deflection. Having competed in more than two years' worth of competition and achieving podium multiple times, v2 is a proven effective design.
In collaboration with: Indesh Vijayanand, Jonah Kittmer, Lucas Skotiniotis, Leo Ping, Giacomo Cristiano under UTRA Combat
- Lightened 3D printed components by more than 30%, only decreasing strength by only ~15% while having sufficient safety factor
- Robot pit crew during competitions to ready for 5-10 minute turnaround - applying Locktite/accelerant, soldering, bodywork fixes, and battery management of up for the entire team
- Implementation of varied movement mechanisms, including a vibration-driven bristle drive, using small slanted ABS extrusions on the bottom
- Basic manual machining with aluminium alloys, titanium rods, and hardened steel

The 4.5lb shell spinner, shuffler ATLAS. A compact design that uses its shell as both a method of prying off metal from others and protecting its own internals.

From left to right, the shell by itself (with its safety foam covers), the whole battle-ready robot (with its weapon safety lock), and the shuffler assembly being checked for debris.
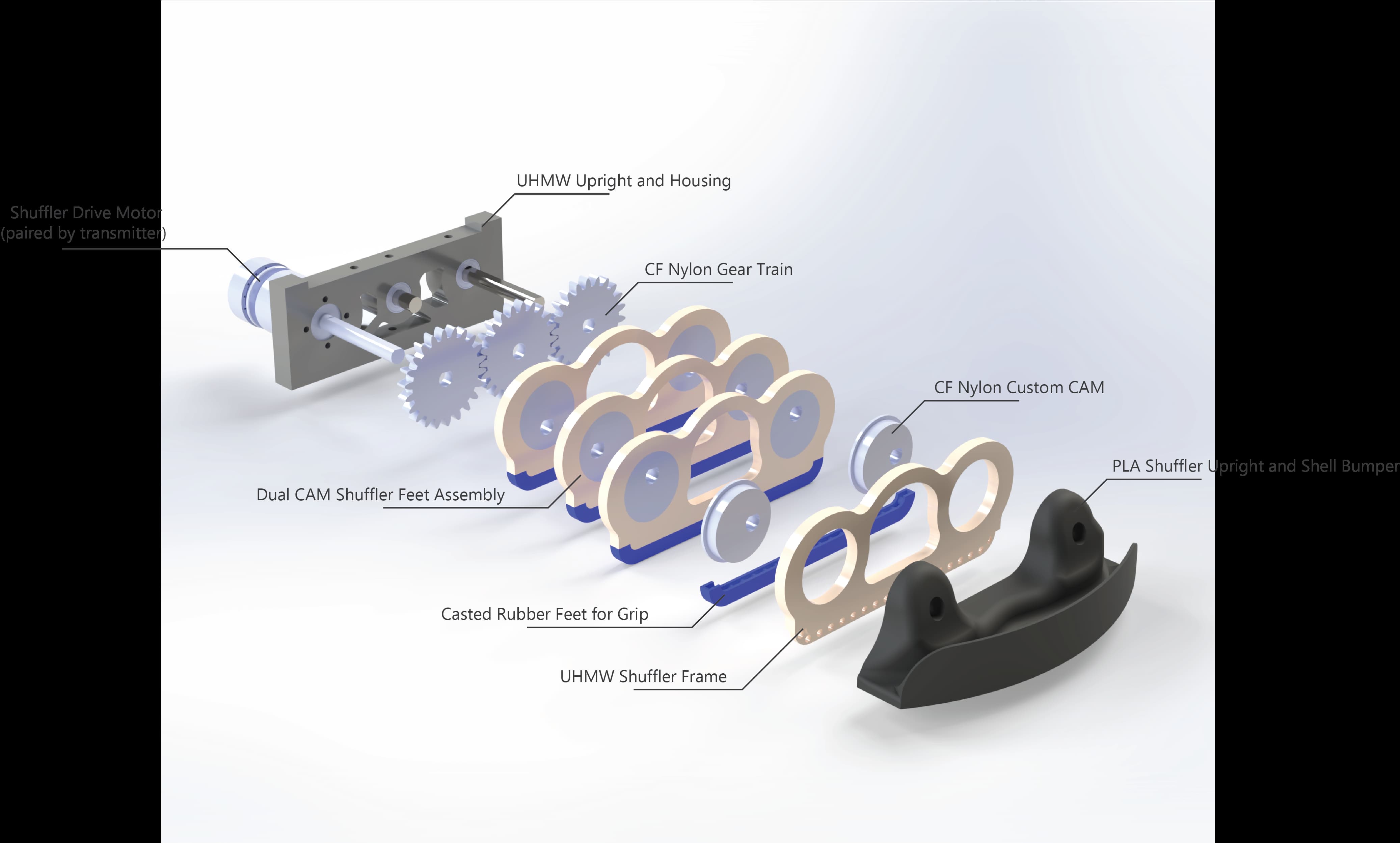
A high level breakdown of the dual CAM shuffler mechanism

On the left, a damaged shell with frayed CF. On the right, a lineup of all of the University of Toronto battle bots in February 2025, Norwalk, New York.